Dromos
Today, the robotics industry has a data problem. The robotics foundation model labs have approximately five orders of magnitude less data to train on than the language model labs.11Zhong et al., “A Survey on Vision-Language-Action Models,” arXiv:2507.01925 (2025). Even more worryingly, no viable data collection solution has yet been implemented as an economy of scale. The gold standard of data is synchronized observation–action pairs on the target embodiment.22This is the standard view for policies trained via imitation learning. Current scalable methods are cheap but don’t have all of these properties.33Simulation suffers from an acute sim-to-real gap when compared to deployment environments and embodiments. Video has no action labels and often contains the wrong embodiment. Teleoperation data does have all desired properties, but carries flat marginal cost per operator-hour.44This is understating the case. Current teleoperation data collection methods might actually have a diseconomy of scale due to the need to constantly innovate diverse tasks and environments. Producing large quantities of valuable data, each unit of which has to contribute some diversity compared to all other collected units of data, arguably has increasing marginal cost.
Today, humans have an embodiment problem. Every person only gets one body in one location. Firstly, this creates the problem of having to transport it everywhere. In 2025, humanity spent 15 trillion dollars on personal transportation and associated infrastructure.5–8
sources
Secondly, this creates a problem when we want to change this body’s shape and abilities. In 2025, humanity spent 300 billion dollars on fitness, cosmetics, prosthetics, and other associated industries.9–13
sources
The solution to both of these problems is a worldwide telexistence network.
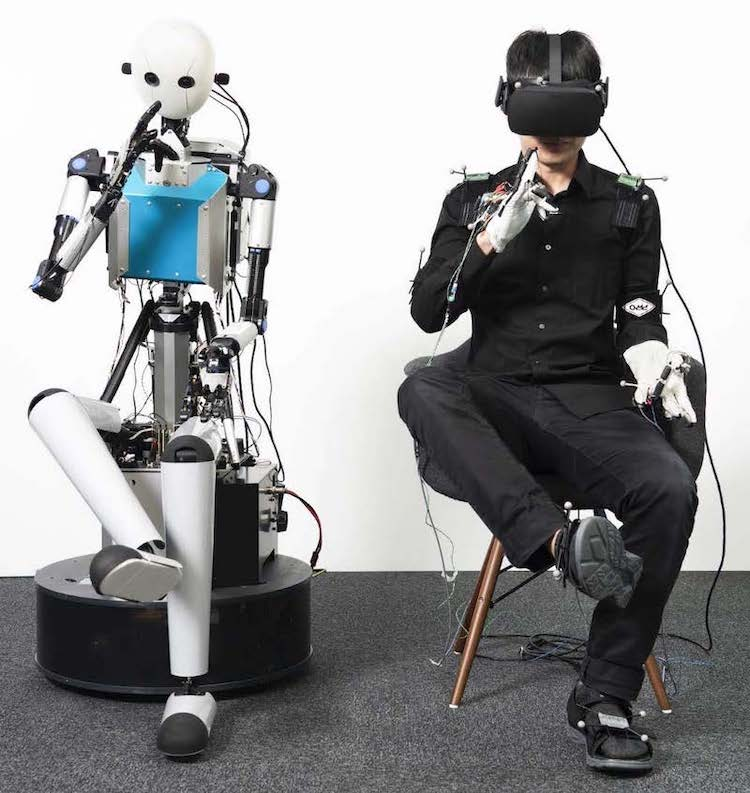
Imagine a human being on one end equipped with audiovisual and haptic feedback equipment (a VR headset and gloves, for example). They are connected over the global network to a humanoid robot at a remote location. If the person is shown the first person point of view of the robot and it copies their movements, their brain soon comes to accept the robot body as their own. This is a phenomenon called the “full body ownership illusion”. It’s so strong, in fact, that they can pilot the robot over to their real body, shake their real hand with their robot hand, and still feel like the robot body is the real one.1414Petkova & Ehrsson, “If I Were You: Perceptual Illusion of Body Swapping,” PLoS ONE (2008). While this illusion is maintained, they experience the feeling of having switched bodies.
This gives human beings a solution to their embodiment problem:
They can be anywhere, instantaneously. Since the user can effectively ‘switch bodies’, the user can just transfer themselves to a robotic body located anywhere in the world. From the user’s perspective, they’ve instantly arrived at the robot’s location.
use cases
This can be used to create a global transportation network. With even a small fraction of the billion humanoids we expect to produce in the next twenty years,1515Morgan Stanley Research, “Humanoids: A $5 Trillion Market”, ~1B units by 2050. one could place bodies in all inhabited cities on earth. Anyone who has business in that city, whether for work, for tourism, or to visit friends and family could get there instantly via renting these bodies out. You can sell teleportation as a product.
They can take on any embodiment. Desirable physical traits can be engineered into the robotic avatars depending on user preference. The end user no longer has to be beholden to the limits of their body, only the limits of our engineering capabilities.
use cases
This can be used as a way for users to visit dangerous or impossible to access locations. A robot can be engineered to withstand extreme conditions. It’s also more disposable than a human life. One can imagine using these robots to spacewalk, explore life-threatening environments, or rush into burning buildings without a second thought. With this technology, humans could do all these things with zero risk. You could sell safe access to dangerous environments as a product.
This can be a way for the disabled, elderly, or infirm to regain ability via partial robot autonomy. A paraplegic, for example, could use the robot but have the lower half controlled by a locomotion policy1616A type of AI model that controls leg movement. they can direct via joystick. The robot body would be able to walk like a fully able person while the user naturally controls the upper body. In effect, this lets the user experience the world as a fully able person. For an even more extreme example, a quadriplegic could have the entire body run autonomously and instruct it only via natural language. In this way, they could regain full body agency with only their voice or a keyboard. You could sell restoring human ability as a product.
This network also gives the robotics community a solution to their data problem. Whenever the user pilots a robotic body, they passively produce teleoperation data. Since the user is paying for the experience, the marginal cost per operator-hour is negative. This ‘data-exhaust’ approach to data collection inverts the cost structure that currently bottlenecks robotics foundation models.
Secondly, unlike teleoperation data that comes from controlled lab settings, the resulting data corpus would gain diversity for free. Humans will use these robots to navigate and interact in homes, streets, shops, and other complex environments. It would also be a good source for social interaction data, as humans communicate with each other while piloting these robots. Taken together, these two factors make the resulting data potentially more valuable than what even current teleoperation collection facilities can provide.
Our goal at Dromos is to create the telexistence network. This has three components:
- Making sensory feedback equipment available to end users. On a technical level, this includes VR headsets, haptic feedback gloves, and omnidirectional treadmills. All three of these technologies have significant room to mature. However, current off-the-shelf hardware is sufficiently advanced to reliably induce within the user the full-body ownership illusion.1717Again, based on the experiments conducted in Petkova and Ehrsson (see note 14).
- Creating a networking solution for worldwide low-latency teleoperation. Latency is introduced both via the time it takes to send data over the global network as well as the latency between image capture, encoding, and decoding from glass-to-glass.1818For the unfamiliar, samconsidine.com/posts/h264-encoding and transitiverobotics.com/blog/webrtc-latency-breakdown are great introductions. The goal is to get to under 100ms latency for closed-loop control of the robot.
- Placing desirable robotic bodies at locations of interest. This includes direct acquisition of humanoid robots and the development of deployment infrastructure. It also includes pursuing the rights, hopefully exclusive, to their deployment at important locations.1919At the moment there are no major legal hurdles to the deployment of robotic bodies in public areas. However, we strongly believe that securing the rights to deploy this network in privately-held areas such as amusement parks, religious sites, and other high-traffic tourist locations will serve as a future moat.
We believe a body should be something you choose and the world should be instantly accessible. Dromos exists to make that true.